
Road Surveying using Geodetics’ Geo-MMS LiDAR Suite of Products
The purpose of this blog – the second in a two-part series – is to continue to explain the capabilities of Geo-MMS LiDAR payloads for road surveys and highway scanning. We will explore the wider workflows surrounding the digital mapping of transport infrastructure and associated assets. In case you missed Part 1 of Road Surface Mapping with LiDAR, it can be found here.
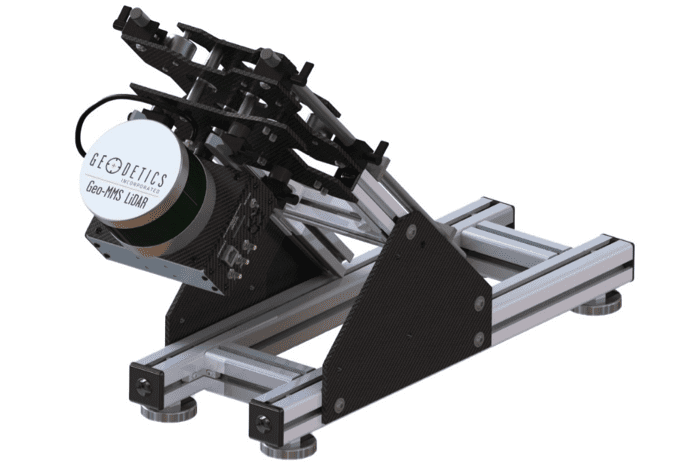
Figure 1. Geo-MMS ground-vehicle mounting assembly with 16-channel tactical-range LiDAR sensor.
Expected increases in US infrastructure spending over the next few years will undoubtedly incorporate heavy capital investment in new transport projects. However, what is arguably more important is the maintenance of existing transport infrastructure. Accumulated road damage carries a high cost to address. Oftentimes, as soon as damage in one location is addressed, a new problem area is identified. Continuous ‘damage repair cycles can be avoided by identifying areas of weakness in the network and addressing them before the damage grows to the extent where manned crew deployment is needed to address the issue, causing disruption to local traffic and increasing costs further. With a lack of high-quality data, inconsistencies in damage reporting, and an overall lack of adequate prioritization, it can be difficult to provide an integrated solution.
A strategic documentation plan for all road networks (preventative maintenance) is more economically attractive than the passive approach often taken by many transport planning departments. 3D scans of the full transport environment feed into other important infrastructure inspections, including road surveys that include assessment of pavement conditions, bridge inspection, roadside powerline assessment, etc. Transport planners need to work smarter rather than harder by leveraging the available technology, achieving more results with less manpower.
LiDAR scan data can be enhanced by spherical imaging of the surrounding landscape in a 360° frame, the same frame a LiDAR sensor operates within. Ladybug, an RGB camera designed for mobile mapping, captures spherical 360° panoramic views of the environment. It also merges images from six internal cameras. Using the Geo-MMS Navigator, images from all six Ladybug cameras are geo-tagged, allowing geolocation features to be registered in the images. The combination of LiDAR and spherical imaging provides a powerful tool for powerline and transmission line monitoring, bridge inspection, road surveys, etc. To facilitate this multi-sensor integration, Geodetics provides a mounting system specifically for this setup, as shown in Figure 2. This bracket has two degrees of freedom such that it can be mounted on any vehicle regardless of orientation and height.

Figure 2. This bracket has two degrees of freedom such that it can be mounted on any vehicle regardless of orientation and height.
This provides a second dataset, used for detailed visual assessment of features of interest identified through LiDAR, including road surface markings and pavement cracks. Full panorama images and 3D scan data, coupled with simultaneously collected precise position, orientation, and timing data combining produce multifaceted, high-resolution maps. These maps provide walk-through simulations – an innovative solution – one which will become a more common practice in the future as the value of manual inspections gradually decreases and digital inventories are required for documenting all infrastructure (and associated assets). The collected data is most valuable when assimilated into existing infrastructure databases which help define strategies for future developments, maintenance schedules, and transport planning, as exemplified in BIM.
Actionable Data
With all Geo-MMS LiDAR payloads come seamless capability to switch between ground-vehicle and UAV platforms. Additional opportunities arise when integrating ground-captured and UAV-captured point cloud data in the same viewing frame. Within the realm of road-surface mapping, these applications can extend to disaster assessment after natural disasters, aging facility inspection, progress inspection on-road remodeling projects, etc.
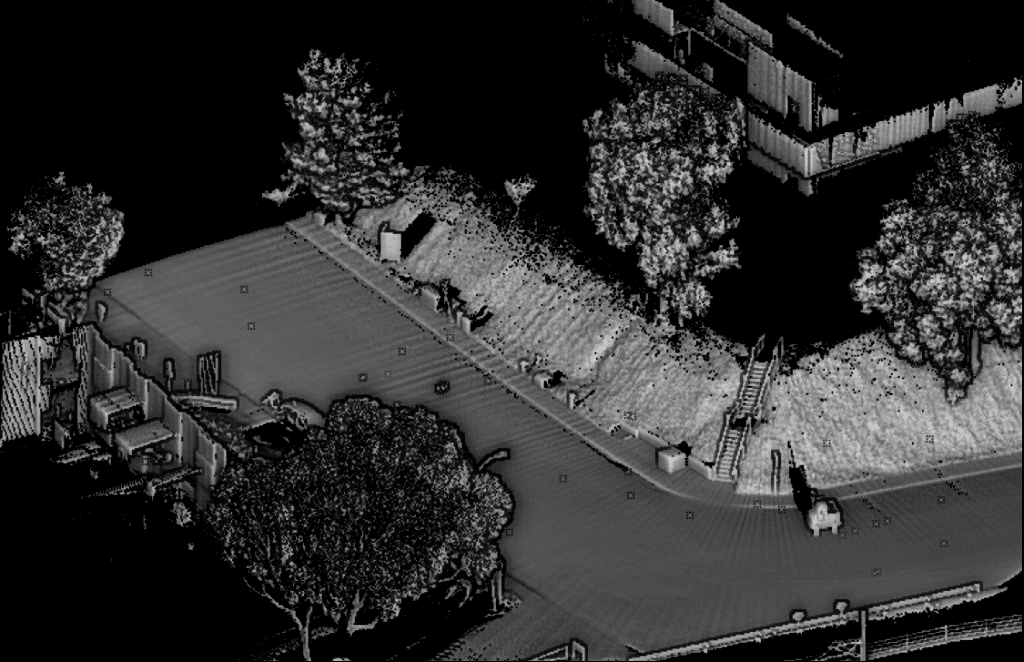
Figure 3. Raw LAS point cloud file captured from a car-mounted Geo-MMS LiDAR payload.
While terrestrial laser scanning can produce superb accuracy, obvious limitations are the duration of set-up and scan time for a relatively small section of roadway. Coupled with the additional labor hours needed to perform this work, accuracy may be high, but at the expense of time, safety and cost-efficiency. A combination of terrestrial, mobile, and UAV data may be the most comprehensive option, but the majority of the workload can be handled by a mobile scanning device. This can be installed on the rear of a car, SUV, ATV, pickup truck, or any other vehicle robust enough to support the temporary installation. The popularity of mobile scanning has increased where software developers have focused on this specific niche and application – TopoDOT software being one such popular example. Software options can automatically create cm-level road surface models, identify and export curbs, railings, utility poles, encroaching vegetation, and other features of interest in the transport infrastructure which can be extracted for further analysis in GIS and CAD programs. Meshing including TINs (Triangulated Irregular Networks) can be performed using widely employed automated algorithms that generate 3D statistics regarding the shape, volume, and frequency of structural anomalies.
What many are seeing across the industry are specialized scanning systems developed specifically for the goal of road/highway maintenance across transport and infrastructure industries. As pioneers in Defense-grade navigation technology and sensor integration, Geodetics is the trusted source for cost-effective and customized LiDAR mapping solutions in the air, on land, and at sea.
Originally published by Geodetics


